Quad Hind leg rigging = grr for beginners
Hey guys, I'm gonna give a little backdrop to my issue to get the best response possible, so I apologize in advance if I seem a little long-winded. I'm basically a beginner, or rather I used to animate with maya many years ago (2003). I left the 3D game (heh, see what I did there?) for awhile, and now I've found myself suddenly back into it, helping with a big indie game project, armed to the teeth with... outdated, obsolete, VERY rusty knowledge. The short version... I'm a beginner again. :O
So rigging. I've been assigned to rig a quadruped. The only thing I remember about rigging these guys is keeping in mind it's like a human leg but standing on the tippy toes. I'm gonna be honest, there's not a lot of free info out there when it comes to specifics. I've been following this tutorial here https://www.peachpit.com/articles/art...02262&seqNum=3 but it seems a little outdated and my rig doesn't seem to be achieving the same results it's intending to give me. I can't seem to find any better ones for the moment. I think the only way I can describe my multiple issues is to put it in pictures... and again I apologize for my newniness. 
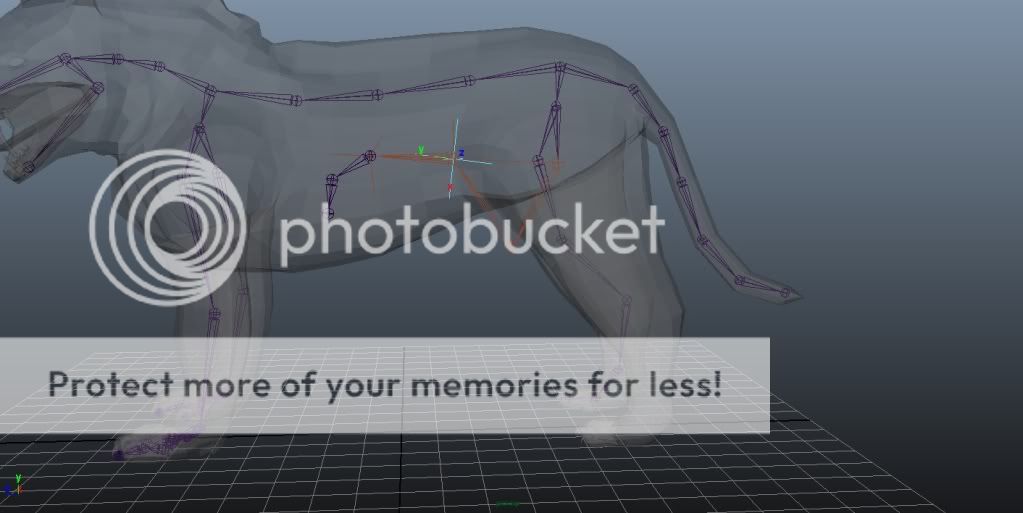
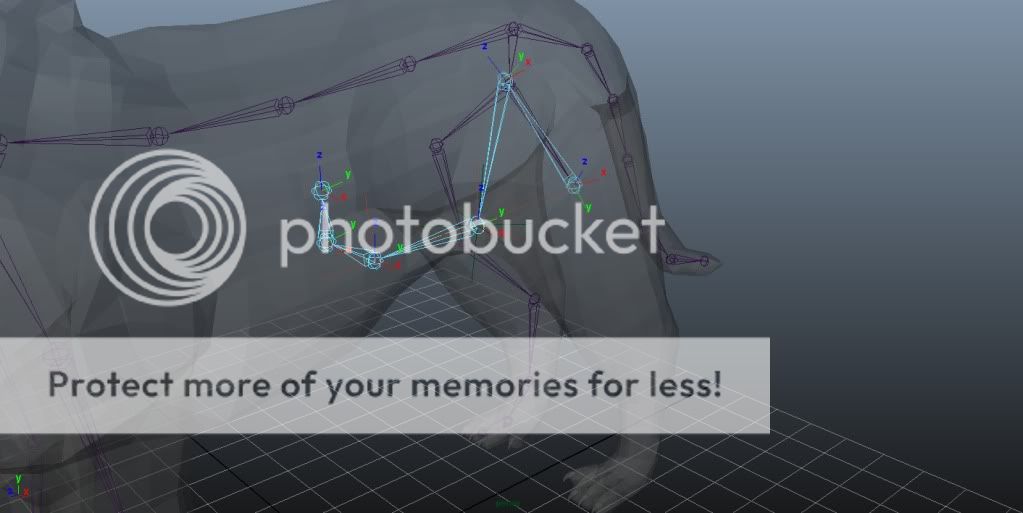
So here's the rig. From what I gather my issues seem to stem from the joint orientation... but I'm not quite sure:

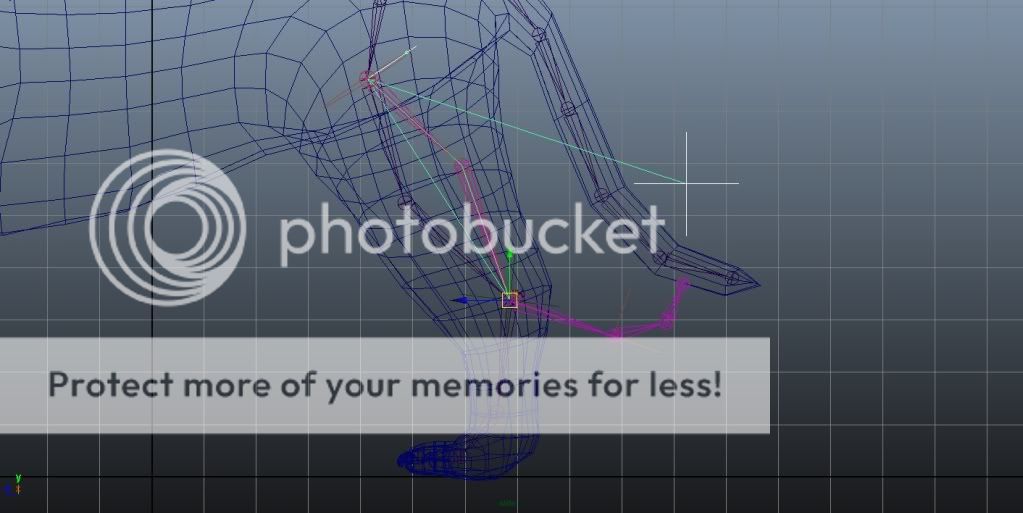
I'm at the point where I'm to orient constrain the IK controller at the top of the shin, to the bottom ankle joint. I'm guessing this is to give rotational control over the foot. But I then this happens:

What I notice is that the Y axis is facing forward when it should be up. After the orient constrain, the axis for the foot joint follows suit. I get that, but what I don't get is, why was the the Y axis in the upper shin not facing up like I had it do when I first oriented all the joints when i completed building the skeleton?
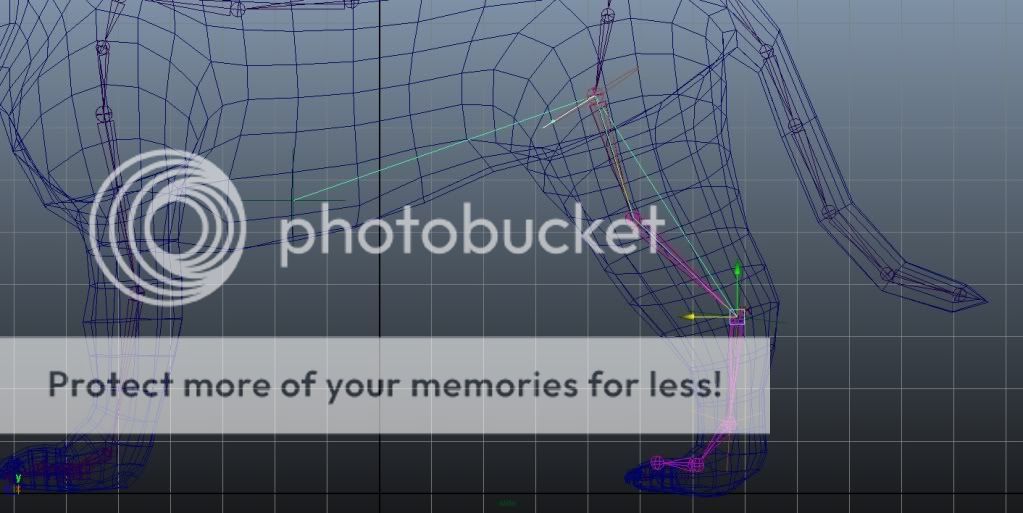
So there was that. I decided to trudge on, keeping that problem in mind and hoping maybe an epiphany would hit me. Besides, it seems without that constrain, I can bend the leg relatively normal, and perhaps I could build a separate control for the foot later. However if I pull the leg up to a certain level (like say a pose where the cat is sitting, this happens:
Okay, well the next step is to add a pole vector. So I create a pole vector and follow the instructions on the tut. Oops!:
But wait! Everything seems to be aiming at this pole vector, so what if I move it to the front like I would a biped?:
You are Eka!
... not really...
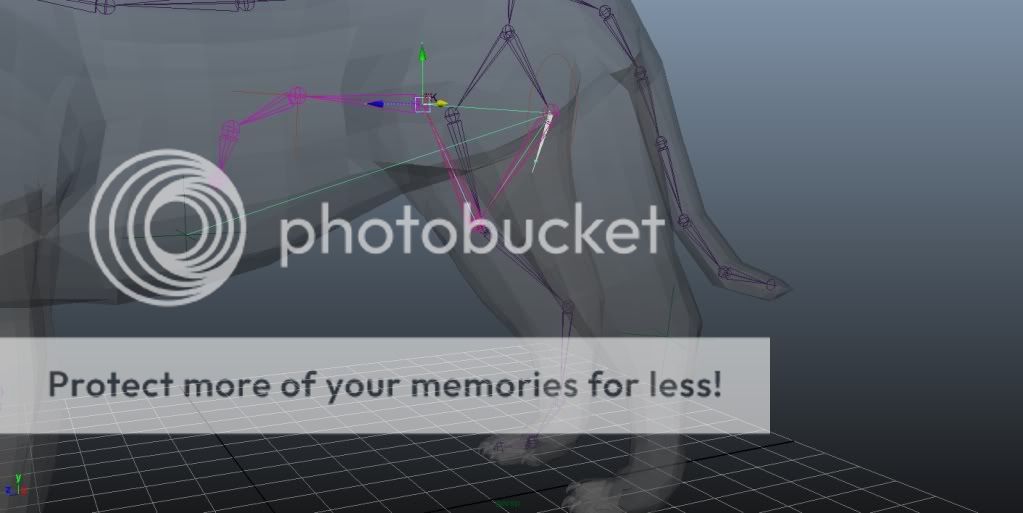
But, wait, what if I parent the pole vector to the IK?:
Boom? Iunno man, it just seems to me like it's there's gonna be chaos when it comes to animatin' time. I mean I still have to add controls to the foot, but I only seem to have sideways rotation, but not up and down.
Oh and I can't seem to zero out the IK handles, freezing transformations just makes them go weird.
Constructive thoughts please. 